ME4: Exoskeleton-Controlled Humanoid Robot

Project Overview
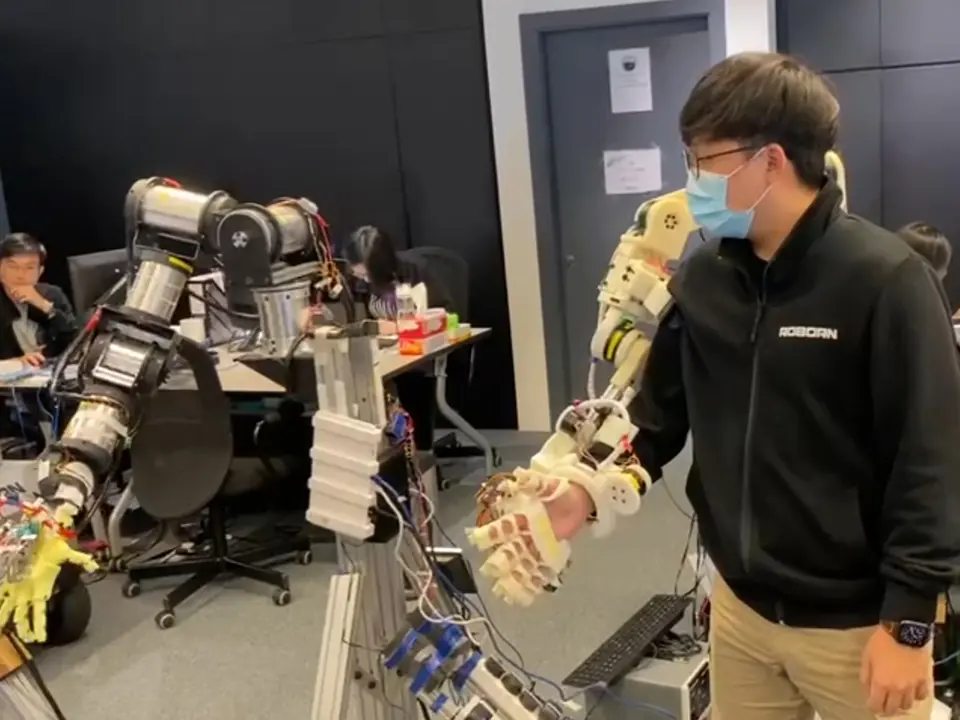
ME4 pairs a wearable exoskeleton controller with a humanoid robot to explore more natural human-to-robot control. The system brings together custom mechanics, electronics, sensors, actuators, haptic feedback, and control software in one integrated interface.
Selected Contributions
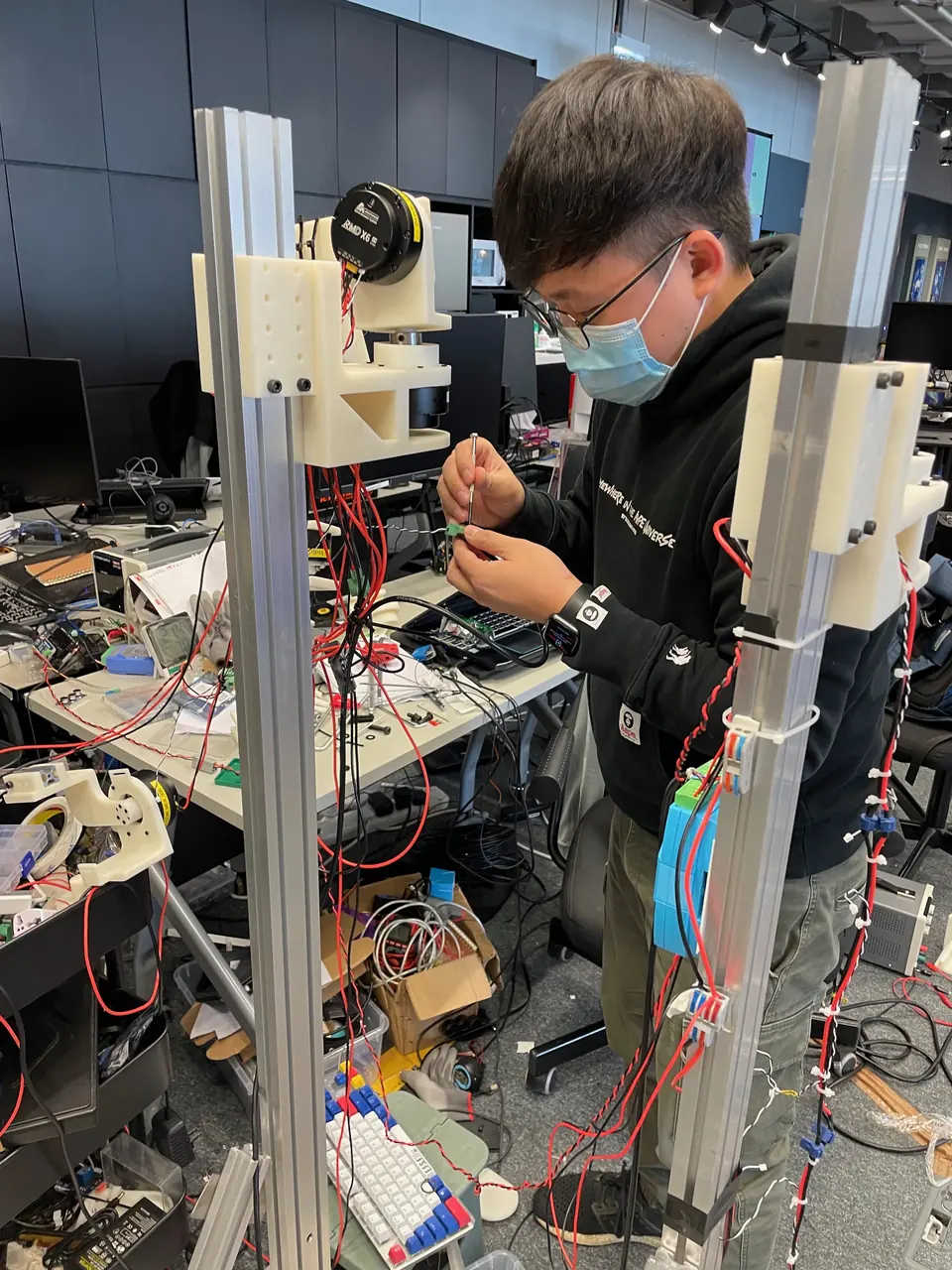
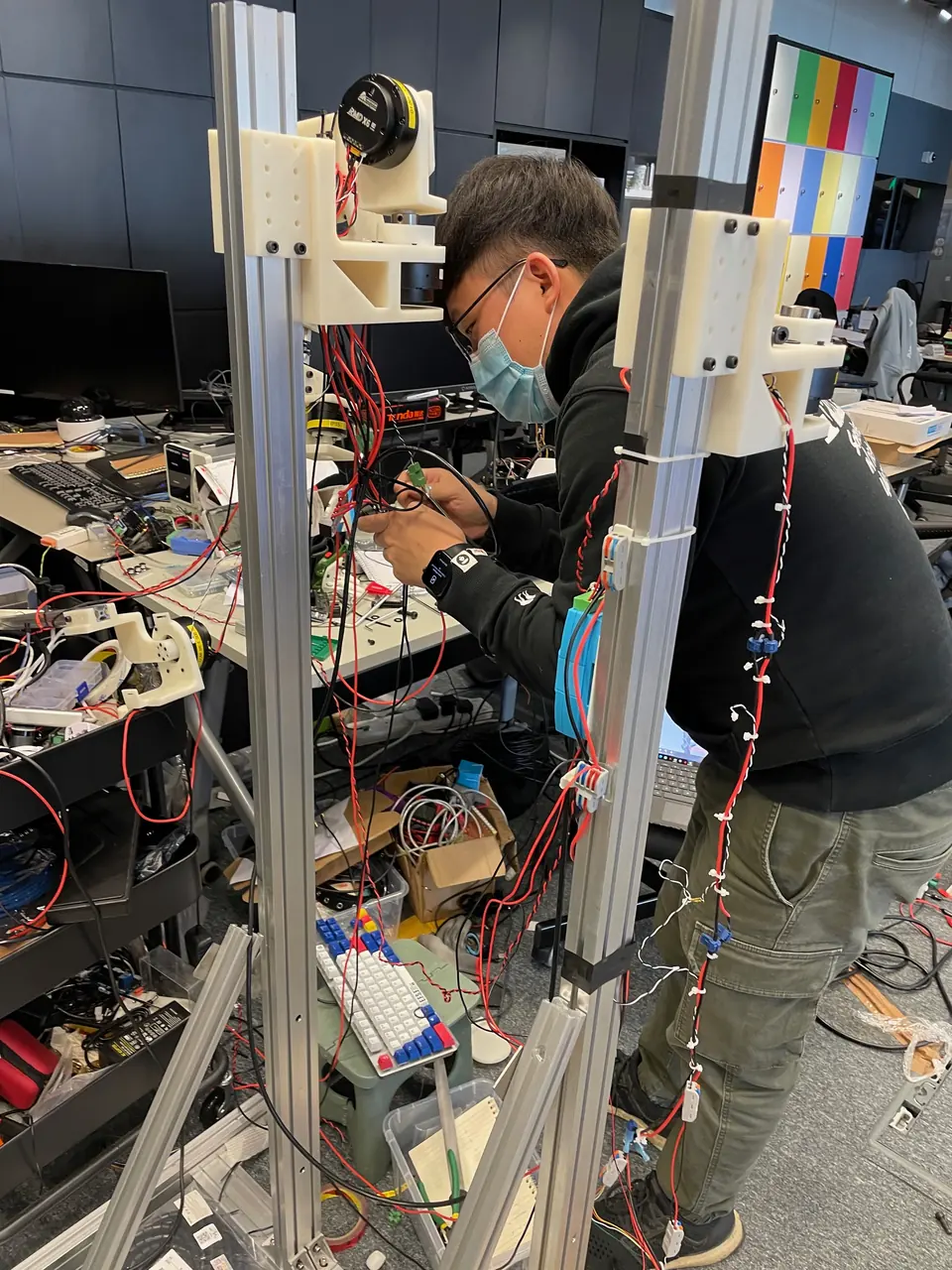
- Designed the mechanical structure and electrical layout for both the wearable controller and humanoid robot.
- Implemented haptic feedback and tuned the mechanism to reduce vibration.
- Developed Linux software for 48 V high-torque BLDC control and wireless communication.
- Maintained the robotic platform, including repairs to 5G communication transmitters and LiDAR modules.