SuperLimb Wireless Motorized Foot Controller
Project Overview
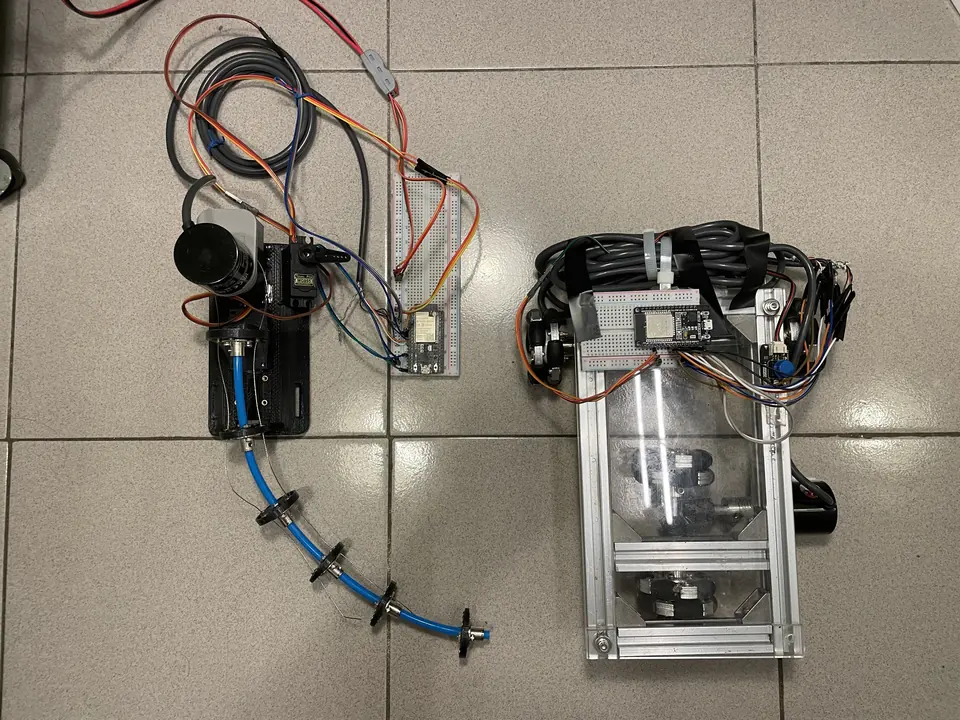
Developed for SuperLimb, this compact wearable foot controller supports hands-free, multi-axis robot input through motorized pedals, wireless telemetry, and ergonomic foot movement.
The prototype combines mechanical design, embedded electronics, haptic feedback, and wireless communication in a wearable human-robot control interface.
Selected Contributions
- Designed the mechanical layout and wearable form of the motorized foot interface.
- Integrated embedded electronics, wireless communication, and haptic feedback for robot control.
- Developed the control approach around precise, ergonomic multi-axis input for SuperLimb.