About me
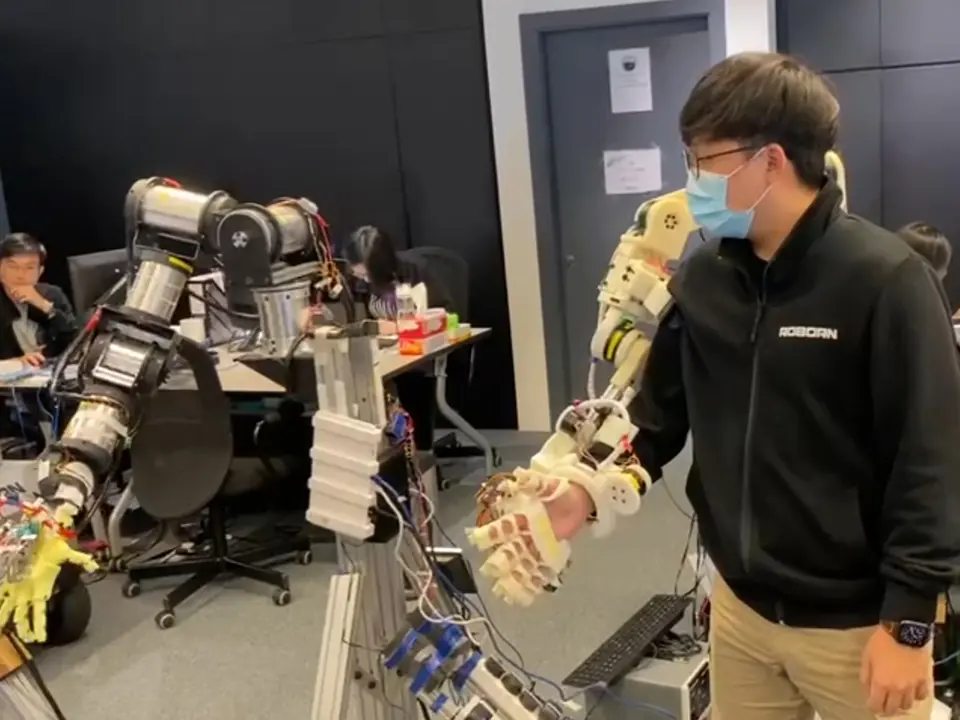
I'm a mechanical engineer specializing in construction robotics. My work spans mechanical design, embedded electronics, ROS software, sensing, system integration, and field validation—taking machines from the first CAD model to reliable operation on site.
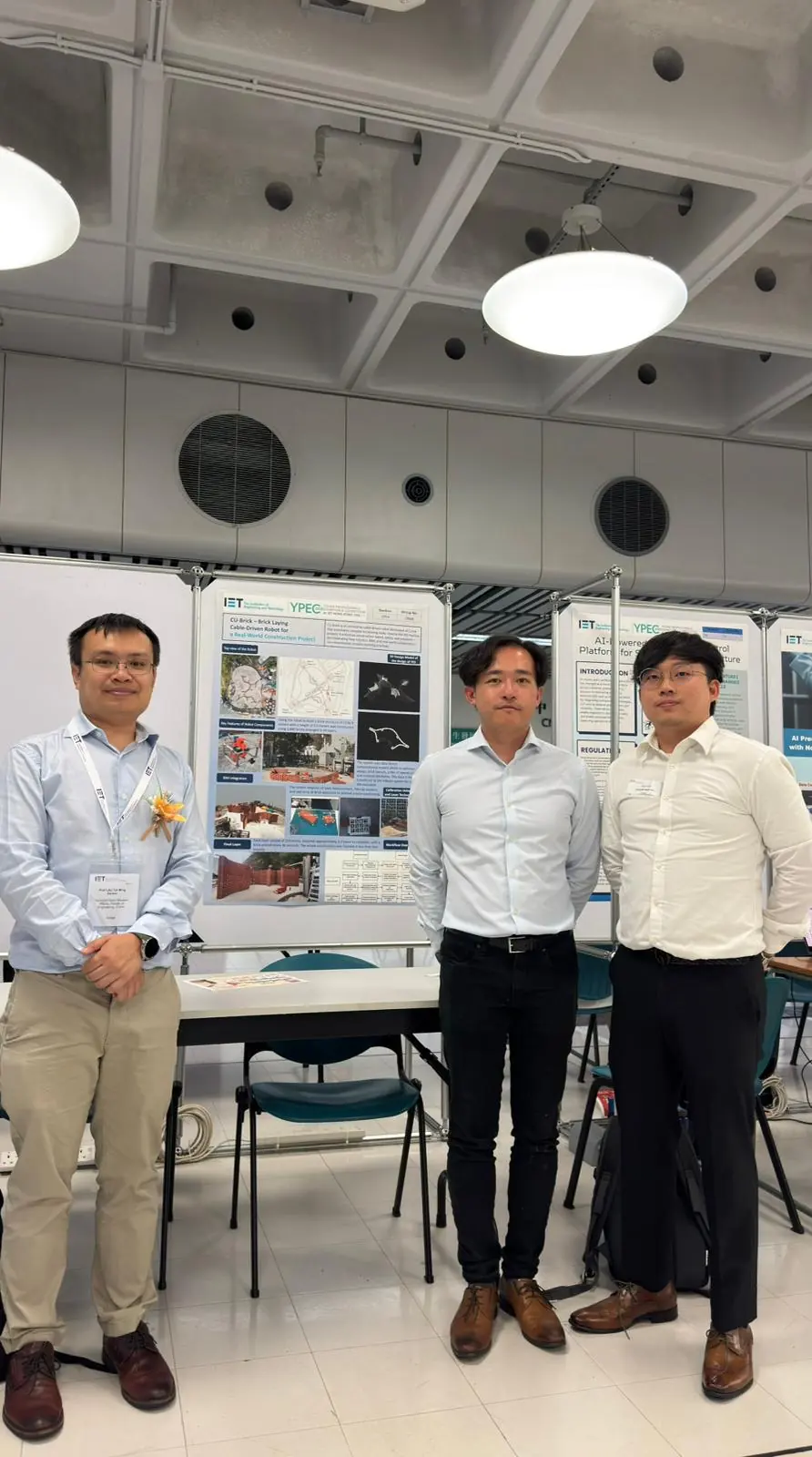
At C3 Construction Robotics, I develop cable-driven and autonomous systems for construction and facade inspection. Highlights include CU-Brick building a 40-layer YES Pavilion structure from more than 5,800 bricks, Robo-Tapper progressing into commercial facade inspections, and presenting the CU-Brick paper at CableCon 2025. I focus on precise engineering, practical safety, and systems that solve real constraints outside the lab.

What i'm doing
-

Software development
Build ROS-based control, navigation, signal-processing, UI, motor-control, and wireless communication software that connects cleanly to real hardware.
-

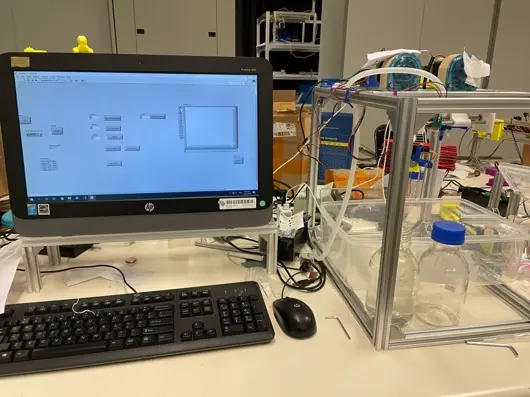
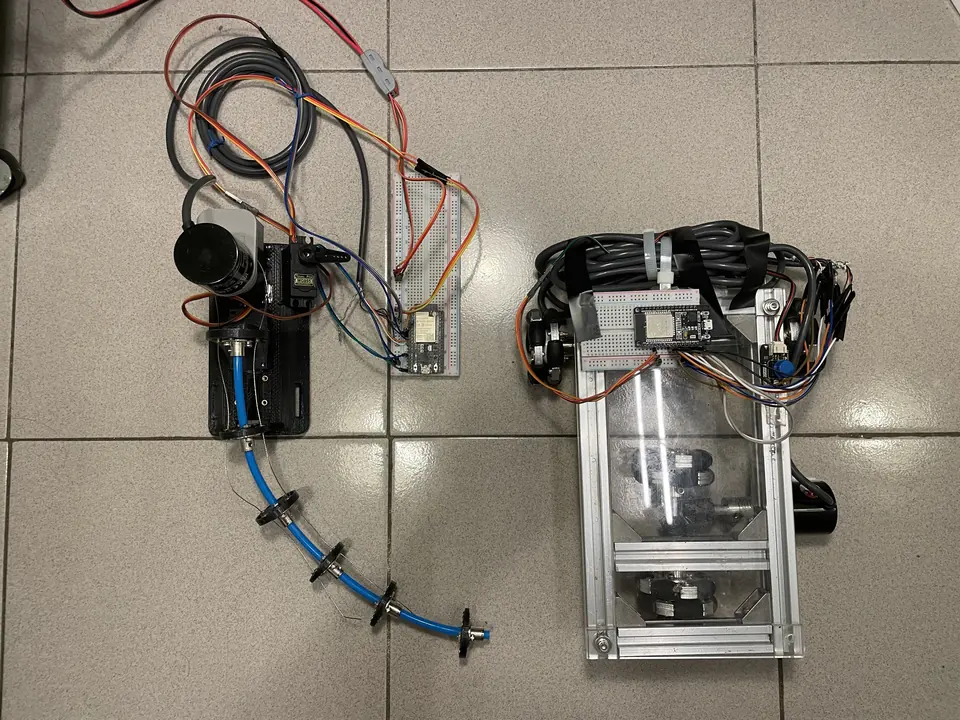
Hardware design
Design robot mechanisms, electrical layouts, and testable prototypes using CAD, 3D printing, CNC machining, sensors, and embedded electronics.
-

Project management
Turn open-ended requirements into coordinated engineering work spanning scope, suppliers, integration, field tests, milestones, and safety documentation.
-

Research and Publishing
Translate experiments into engineering evidence and clear technical communication, including peer-reviewed work and conference presentations.